Cours de Relativité Générale
D’après “ lecture notes on General relativity ”
De Sean M. Carroll
http://preposterousuniverse.com/grnotes/
Traduction et adaptation par Jacques FRIC
Avril 2002 dernière mise à jour 18/07/2015
l J. Fric endosse toute responsabilité pour les erreurs que sa traduction (qui n’a pas été vérifiée par l’auteur) aurait pu ajouter. En cas de doute, veuillez-vous rapporter à la version originale.
1- Relativité Restreinte et Espace-temps plat version PDF
2- Variétés différentielles Topologiques Version PDF
3- De la courbure des Espaces (Variétés Riemanniennes) Version PDF
5- Compléments Géométriques Version PDF
6- Champ faible et ondes gravitationnelles Version PDF
7- La solution de Schwarzschild et les trous noirs Version PDF
I. Relativité Restreinte et Espace-temps plat
Table des matières
Introduction----------------------------------------------------------------------------------------------------------5
Espace-temps de la RR comparé à Espace et Temps de la mécanique classique---------------------------5
La distance : invariant métrique classique-----------------------------------------------------------------------5
Construction d’un référentiel inertiel en RR--------------------------------------------------------------------6
Événements, points événements----------------------------------------------------------------------------------6
Où les coïncidences sont fondamentales-------------------------------------------------------------------------6
L’intervalle d’espace-temps----------------------------------------------------------------------------------------7
Espace de Minkowski-----------------------------------------------------------------------------------------------7
Coordonnées d’espace-temps--------------------------------------------------------------------------------------7
La métrique de Minkowski-----------------------------------------------------------------------------------------8
Quelle sorte de transformation va laisser l’intervalle (1.9) invariant ? --------------------------------------8
Les translations---------------------------------------------------------------------------------------------------8
Une transformation plus générale------------------------------------------------------------------------------9
Quelles sortes de matrices laissent l’intervalle invariant ?-----------------------------------------------------9
Groupe de Lorentz---------------------------------------------------------------------------------------------------9
Les transformations de Lorentz se divisent en plusieurs classes.--------------------------------------------10
Rotations classiques--------------------------------------------------------------------------------------------10
Vitesse relatives : les propulsions----------------------------------------------------------------------------10
Le groupe de Poincaré-----------------------------------------------------------------------------------------10
Transformation des coordonnées---------------------------------------------------------------------------------10
Le diagramme spatio-temporel-----------------------------------------------------------------------------------11
Invariance du chemin de la lumière dans le diagramme------------------------------------------------------11
Les cônes de lumière-----------------------------------------------------------------------------------------------11
Les types d’intervalles---------------------------------------------------------------------------------------------12
Vecteurs en RR-----------------------------------------------------------------------------------------------------12
L’espace tangent----------------------------------------------------------------------------------------------------12
Espace vectoriel-----------------------------------------------------------------------------------------------------13
Fibré tangent---------------------------------------------------------------------------------------------------------13
Composantes du vecteur-------------------------------------------------------------------------------------------13
Vecteur tangent-----------------------------------------------------------------------------------------------------14
Transformation des composantes---------------------------------------------------------------------------------14
Transformation des vecteurs de base-----------------------------------------------------------------------------14
Les vecteurs de base subissent la transformation de Lorentz inverse de celle des composantes------------15
Espace vectoriel dual-----------------------------------------------------------------------------------------------15
Espace cotangent----------------------------------------------------------------------------------------------------15
Forme linéaire---------------------------------------------------------------------------------------------------15
Vecteurs contravariants, vecteurs covariants----------------------------------------------------------------16
Forme mono linéaire--------------------------------------------------------------------------------------------16
Action d’un vecteur dual sur un vecteur-------------------------------------------------------------------------16
Les vecteurs sont les formes linéaires des vecteurs duaux-------------------------------------------------16
Fibré cotangent------------------------------------------------------------------------------------------------------16
Le résultat de l’action d’un champ de vecteurs duaux sur un champ de vecteurs n’est pas un simple nombre mais un scalaire----------------------------------------------------------------------------------------17
Propriétés de transformation d’un vecteur dual-------------------------------------------------------------17
Exemples de vecteurs duaux--------------------------------------------------------------------------------------17
Vecteurs lignes--------------------------------------------------------------------------------------------------17
Gradient d’une fonction scalaire------------------------------------------------------------------------------18
Règle de transformation des composantes d’un vecteur dual---------------------------------------------18
Notion de tenseur---------------------------------------------------------------------------------------------------18
L’espace de tous les tenseurs d’un type donné (k, l) forme un espace vectoriel----------------------- 19
Produit tensoriel-------------------------------------------------------------------------------------------------19
Base pour l’espace des tenseurs (k, l)------------------------------------------------------------------------19
Champs de tenseurs---------------------------------------------------------------------------------------------20
Exemples de tenseurs-----------------------------------------------------------------------------------------------21
Un tenseur (1,1) est simplement une matrice Mij.----------------------------------------------------------21
Tenseur métrique---------------------------------------------------------------------------------------------------21
Produit scalaire--------------------------------------------------------------------------------------------------21
Norme d’un vecteur------------------------------------------------------------------------------------------------ 21
Tenseur (ou symbole) de Konecker---------------------------------------------------------------------------22
Tenseur métrique inverse--------------------------------------------------------------------------------------22
Tenseur de Levi-Civita-----------------------------------------------------------------------------------------22
Propriété remarquable des tenseurs métrique, métrique inverse, Kronecker delta, et Levi-Civita---23
Tenseur intensité de champ électromagnétique-----------------------------------------------------------------23
Contraction d’un tenseur---------------------------------------------------------------------------------------23
Abaisser et élever des index d’un tenseur--------------------------------------------------------------------24
La vérité sur le gradient dans un espace Euclidien---------------------------------------------------------24
Tenseurs symétriques----------------------------------------------------------------------------------------------25
Tenseur antisymétrique--------------------------------------------------------------------------------------------25
Symétriser un tenseur----------------------------------------------------------------------------------------------25
Antisymétriser un tenseur-----------------------------------------------------------------------------------------26
Dérivée partielle d’un tenseur dans un espace Euclidien------------------------------------------------------26
Équations de Maxwell de l’électromagnétisme-----------------------------------------------------------------26
Condition d’invariance par une transformation de Lorentz-----------------------------------------------27
Quadri-vecteur courant, J = (r, J1, J2, J3)------------------------------------------------------------------ 27
Version tensorielle contemporaine des équations de Maxwell--------------------------------------------28
Équations covariantes-------------------------------------------------------------------------------------------28
Formes différentielles----------------------------------------------------------------------------------------------28
Produit extérieur----------------------------------------------------------------------------------------------------29
Dérivée extérieure--------------------------------------------------------------------------------------------------29
La dérivée extérieure est un tenseur--------------------------------------------------------------------------29
Formes différentielles fermées, formes différentielles exactes-------------------------------------------30
Cohomologie de Rahm-----------------------------------------------------------------------------------------30
Dualité de Hodge---------------------------------------------------------------------------------------------------30
Utilisation des formes différentielles en électrodynamique-----------------------------------------------31
Invariance de jauge---------------------------------------------------------------------------------------------31
La dualité de Hodge au cœur d’un des sujets les plus brûlants de la physique-------------------------32
Ligne d’Univers des particules--------------------------------------------------------------------------------33
Élément différentiel d’intervalle----------------------------------------------------------------------------------33
Longueur du chemin--------------------------------------------------------------------------------------------33
Temps propre--------------------------------------------------------------------------------------------------------34
Quadri vitesse-------------------------------------------------------------------------------------------------------34
Quadri vecteur énergie impulsion--------------------------------------------------------------------------------34
Quadriforce------------------------------------------------------------------------------------------------------35
Tenseur énergie impulsion----------------------------------------------------------------------------------------36
Fluides------------------------------------------------------------------------------------------------------------36
Fluides parfaits--------------------------------------------------------------------------------------------------36
Quadrivecteur numérique de flux-----------------------------------------------------------------------------36
Tenseur énergie-impulsion de la poussière------------------------------------------------------------------36
Tenseur énergie-impulsion d’un fluide parfait------------------------------------------------------------------37
Conservation de l’énergie, de l’impulsion-----------------------------------------------------------------------38
Energie gravitationnelle--------------------------------------------------------------------------------------------38
Nous allons commencer par un tour d’horizon sur la RELATIVITÉ RESTREINTE (RR) et l’ESPACE-TEMPS plat associé : est plat un espace-temps dont la métrique peut être mise sous une forme où les coefficients ne dépendent pas des coordonnées. Cela va nous permettre de nous rappeler l’objet de la RELATIVITÉ RESTREINTE et d’introduire les tenseurs et tout ce qui tourne autour, concepts qui vont se révéler essentiels par la suite, dans le contexte plus simple de la relativité Restreinte libre des complications supplémentaires liées à la courbure de l’ESPACE-TEMPS. Dans cette partie nous allons exclusivement travailler dans un espace-temps plat et de plus en coordonnées orthonormées (type coordonnées cartésiennes). Il est inutile de dire que nous pourrions travailler dans n’importe quel système de coordonnées, mais ce serait empiéter sur les parties suivantes, donc nous différerons cet aspect.
On dit souvent que la RELATIVITÉ RESTREINTE est une théorie de l’espace-temps à 4 dimensions : trois d’espace, une de temps. La mécanique Newtonienne utilise également trois dimensions d’espace et une de temps, où est la différence ?
Si on considère un jardin, variété à deux dimensions, nous allons repérer les points sur un tel plan en introduisant arbitrairement des coordonnées, par exemple x, y orthogonales.
Il est certain que ce qui va nous intéresser ce sont les propriétés géométriques (les invariants) qui sont indépendantes des coordonnées arbitraires. Par exemple la distance entre deux points donnée par :
|
(1.1) |
|
|
|
|
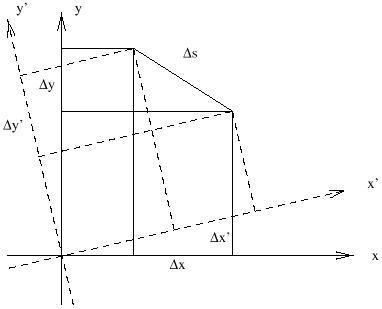
Si on avait choisi un autre système de coordonnées cartésiennes déduit du premier par une rotation des axes x, y autour de l’origine, on aurait des coordonnées x' et y' avec pour la distance la même formule :
|
(1.2) |
Nous en concluons que la distance entre deux points est invariante vis-à-vis de tels changement de coordonnées.
C’est pourquoi il est important de penser le plan comme variété à deux dimensions, bien que nous utilisions deux nombres pour repérer les points. Ces nombres ne sont pas l’essence de la géométrie, puisqu’ils se transforment en d’autres lorsqu’on fait subir une rotation aux axes (on peut les permuter) en laissant invariant les distances, mais seulement un moyen conventionnel de la décrire. En mécanique Newtonienne ce n’est pas le cas, on ne peut pas permuter l’axe du temps avec un axe d’espace. Le temps est une dimension indépendante de l’espace.
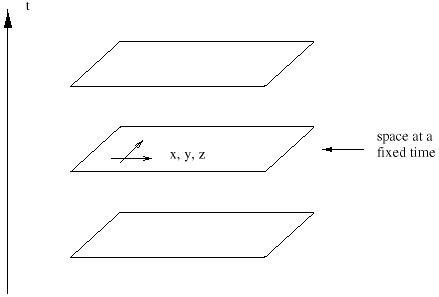
Il en va autrement en RELATIVITÉ RESTREINTE. Considérons les coordonnées (t, x, y, z) de l’ESPACE-TEMPS, dans cet ordre. Les coordonnées spatiales (x, y, z) forment un système cartésien standard, que l’on peut construire en assemblant des barres rigides qui se coupent à angle droit. Ce système peut se mouvoir librement non accéléré. La coordonnée temporelle peut être fournie par un jeu d’horloges attachées aux barres. On peut supposer les barres infiniment longues et les horloges infiniment nombreuses pour baliser tout l’espace-temps (expérience de pensée). Les horloges sont synchronisées en considérant que si nous voyageons à une vitesse constante v dans une direction d’un point A à un point B, la différence de temps marquée par les horloges en A et B, va être la même que si j’effectue le même voyage dans l’autre direction (de B vers A) dans les mêmes conditions (dans sa définition de l’article fondateur de la RELATIVITÉ RESTREINTE de 1905, Einstein utilise la lumière comme voyageur). Le système de coordonnées ainsi construit est appelé référentiel inertiel (ou Galiléen).
Un événement (on dit parfois point événement) est défini par une occurrence dans l’espace et le temps, caractérisé uniquement par (t, x, y, z).
En fait Einstein insiste beaucoup sur le concept de coïncidence, seul concept qui a une réalité physique selon lui, une mesure d’espace-temps correspond à une coïncidence entre :
- Le point événement
- Son image spatio-temporelle dans le référentiel : Les valeurs repérées sur les règles du point du référentiel qui coïncide avec le point événement à l’instant considéré, la valeur de l’horloge située en ce point à cet instant.
Ceci étant précisé, introduisons ex abrupto l’intervalle d’espace-temps entre deux événements.
|
(1.3) |
|
Remarquons que cette expression peut être positive, négative ou nulle (même pour deux points différents). Ici « c » est un facteur constant correspondant à une vitesse pour obtenir une équation homogène. Nous savons que c’est la vitesse de la lumière, l’important pourtant n’étant pas que les photons voyagent à la vitesse de la lumière mais qu’il y ait un invariant de ce type.
Cela signifie que si nous procédons aux mêmes mesures dans un autre référentiel inertiel (t', x', y', z') nous allons obtenir la même valeur de s² :
|
(1.4) |
C’est pourquoi, on peut affirmer que la RELATIVITÉ RESTREINTE est une théorie se référant à un espace-temps à 4 dimensions appelé espace de Minkowski qui est un cas particulier de variété à 4 dimensions dont nous parlerons plus tard.
Comme nous allons le voir, la transformation de coordonnées que nous avons implicitement définie permet d’échanger les dimensions d’espace et de temps.
Elle généralise la notion d’invariance de la distance par rotation aux quatre dimensions. La notion d’évènements simultanés perd sa signification absolue, le temps n’étant plus absolu et dépendant du référentiel.
La distinction entre temps et espace qui sont liés par la relation (1.3) de l’espace de Minkowski est conventionnelle et ceci bien que l’espace et le temps gardent certaines caractéristiques propres, reflétées par le signe différent dans (1.3)
La plupart des paradoxes de la RR résultent de la persistance de la notion de temps absolu. En raisonnant en espace-temps, la plupart de ces paradoxes disparaissent.
Introduisons une notation adaptée. Les coordonnées d’espace-temps seront dénotées par des lettres affectées d’un index haut que nous appellerons “ exposant ” de type lettre grecque représentant une valeur de 0 à 3, où 0 représente la coordonnée “ temporelle ” soit :
|
(1.5) |
Ne pas confondre cet “ exposant ” avec un exposant mathématique. Pour simplifier nous poserons également :
|
(1.6) |
Ce qui permet d’éviter de surcharger les formules. De ce fait, si nous gardons la seconde comme unité de temps, l’unité de distance vaudra 3 × 108 mètres. Si nous devons faire référence aux dimensions d’espace seulement, nous utiliserons un exposant de type lettre latine.
|
(1.7) |
Comme nous allons souvent l’utiliser, il va être commode d’écrire l’intervalle d’espace-temps sous une forme compacte.
Nous allons introduire une matrice (4 x 4), la métrique, que nous écrirons avec deux index bas que nous appellerons “ indices ” :
|
(1.8) |
|
|
|
|
Un certain nombre d’ouvrages utilisent une convention de signe opposée pour la métrique, donc soyons prudents. Nous avons alors la formule sympathique suivante :
|
(1.9) |
Remarquons que nous avons utilisé la convention d’Einstein pour la sommation des index. Lorsqu’un index repéré par la même lettre apparaît dans une telle formule en exposant et en indice, cela signifie qu’on doit faire la somme des produits des termes pour la même valeur de l’index, indexés de 0 à 3 dans notre cas. Le résultat montre que (1.9) est identique à (1.3).
Considérons plus formellement les types de transformation des coordonnées d’espace-temps.
|
(1.10) |
Où am
est un ensemble de quatre valeurs fixes. (Remarquons que avons
affecté le “ prime ” à l’index
pas à “ x ”). Comme les translations
laissent
![]() xm
invariant, il est évident que l’intervalle est
invariant.
xm
invariant, il est évident que l’intervalle est
invariant.
Une transformation plus générale consiste à multiplier le “quadrivecteur colonne ” xm par une matrice (4x4) indépendante de l’espace-temps :
|
(1.11) |
Soit en utilisant une notation matricielle plus conventionnelle :
|
(1.12) |
Ce type de transformation ne conserve pas les différences
![]() xm,
mais les multiplient par la matrice
xm,
mais les multiplient par la matrice![]() .
.
En respectant la notation propre aux matrices cela implique que :
|
(1.13) |
Car la transposée d’un produit de matrices est égal au produit inversé des transposés et donc :
|
(1.14) |
Soit :
|
(1.15) |
Déterminons les matrices Lm'n qui satisfont à (1.15) garantissant la conservation de l’intervalle d’espace-temps, lorsqu’on les utilise pour transformer les coordonnées.
Les matrices qui satisfont (1.14) forment un groupe vis-à-vis de la multiplication, appelé le groupe de Lorentz. Il y a une relation étroite entre le groupe des rotations O (3) de l’espace tridimensionnel et le groupe de Lorentz. Le groupe des rotations peut être interprété comme le groupe des matrices (3 x 3) qui satisfont :
|
(1.16) |
Où 1 est la matrice Identité (3 × 3). La similitude avec (1.14) est évidente, la seule différence résidant dans le signe moins du premier terme de la métrique h, représentant la coordonnée temporelle. Du coup, le groupe de Lorentz est souvent référencé par O(3,1). La matrice Identité 3 × 3 est simplement la métrique de l’espace Euclidien 3D. Une métrique où toutes les valeurs sont égales et positives est appelée euclidienne, tandis que celles qui comme (1.8) contiennent un seul signe moins sont appelées lorentziennes.
La première est celle des rotations classiques telles que la rotation dans le plan x-y :
|
(1.17) |
L’angle de rotation
![]() est
une variable périodique de période 2
est
une variable périodique de période 2![]() .
.
Il y a aussi des propulsions qui peuvent s’interpréter comme des rotations entre l’espace et le temps. Un exemple est donné ci-dessous :
|
(1.18) |
|
|
|
|
Le paramètre de propulsion F
à la différence des rotations est défini de -
![]() à
+
à
+![]() .
Il y a aussi des transformations discrètes qui renversent la
direction du temps ou d’une ou plusieurs d’espace.
Lorsque ces dernières sont exclues on a le groupe propre de
Lorentz SO(3,1). Une transformation générale s’obtient
en multipliant les transformations individuelles. L’expression
explicite pour cette matrice à 6 paramètres (3
rotations, 3 propulsions) est assez touffue et nous ne la donnerons
pas ici. En général les transformations du groupe de
Lorentz ne vont pas commuter, le groupe n’étant pas
abélien.
.
Il y a aussi des transformations discrètes qui renversent la
direction du temps ou d’une ou plusieurs d’espace.
Lorsque ces dernières sont exclues on a le groupe propre de
Lorentz SO(3,1). Une transformation générale s’obtient
en multipliant les transformations individuelles. L’expression
explicite pour cette matrice à 6 paramètres (3
rotations, 3 propulsions) est assez touffue et nous ne la donnerons
pas ici. En général les transformations du groupe de
Lorentz ne vont pas commuter, le groupe n’étant pas
abélien.
L’ensemble qui inclut les transformations de Lorentz et les quatre translations est le groupe de Poincaré, non abélien, qui comporte dix paramètres.
Nous ne serons pas surpris d’apprendre que les propulsions correspondent aux changements de coordonnées nécessitées lorsqu’on repère les événements dans un nouveau référentiel qui se meut à vitesse constante par rapport à l’original. Regardons cela de plus près.
Pour la transformation décrite par (1.18), les coordonnées transformées t' et x' sont données par :
|
(1.19) |
Nous voyons que le point défini par x' = 0 se déplace. Sa vitesse est :
|
(1.20) |
Avec une notation plus terre à terre, en posant F= tanh-1v, on obtient :
|
(1.21) |
où g = (1-v²) -1/2. Notre approche formelle rejoint l’approche conventionnelle pour établir les relations de transformation de Lorentz.. L’application de ces formules, conduit à la dilatation du temps, à la contraction des longueurs etc.
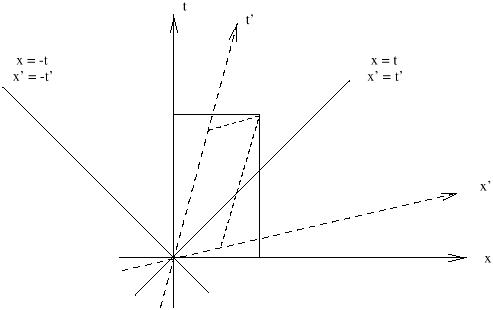
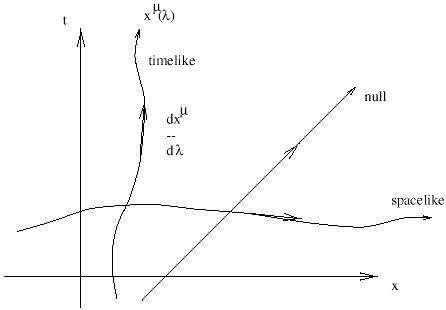
Le diagramme spatio-temporel se révèle être un outil très utile pour représenter l’espace de Minkowski. Traditionnellement on ne représente que les variables x et t (une variable d’espace et la variable de temps) dans un référentiel orthonormé. Remarquons que la représentation d’une seule variable d’espace, parmi les trois, n’entache pas trop la généralité, du fait que les trois variables d’espaces sont équivalentes et interchangeables.
Alors, selon (1.19), si on représente l’axe x' dans le plan x-t, il est caractérisé par l’équation (t' = 0). Il est fonction de la propulsion et est décrit par t = xtanhF, tandis que l’axe t' (x' = 0) est décrit par t = x/tanhF. On voit que les nouveaux axes (x',y') d’espace et de temps subissent une rotation qui les rapprochent l’un de l’autre sous l’effet de la propulsion. Dans la représentation de ce diagramme, ils n’apparaissent plus orthogonaux au sens Euclidien traditionnel, bien que dans le contexte Lorentzien, qui correspond à la “ réalité physique ” ils le restent. Ce n’est pas surprenant, car l’espace-temps est à quatre dimensions et sa représentation par une tranche 2D n’en est qu’une coupe qui ne le décrit qu’imparfaitement.
Il est instructif de considérer le chemin suivi pour la vitesse c = 1 dans les deux référentiels. Dans les coordonnées originales il est décrit par x = ±t. Dans le nouveau système il est décrit par x' = ±t' qui correspond à la même droite que x = ±t. La transformation laisse donc invariante dans ce diagramme les chemins de ce type. Nous savons que c est la vitesse de la lumière, mais nous retrouvons par ce moyen le fait que la lumière se déplace à la même vitesse dans les deux référentiels.
L’ensemble des points qui est relié à un événement unique par des droites correspondant au mouvement de la lumière est appelé un cône de lumière. Ce cône de lumière est invariant par une transformation de Lorentz. Les cônes de lumière sont divisés naturellement entre passé et futur.
Les points à l’intérieur des cônes de lumière du passé et du futur d’un point p sont dits séparés par un intervalle de type temps de p alors que ceux à l’extérieur sont dits séparés par un intervalle de type espace de p. Ceux sur le cône sont dits séparés par un intervalle de type nul de p où de type lumière.
En se référant à (1.3), nous voyons que l’intervalle de type temps est négatif, celui de type espace positif et celui de type nul (ou lumière) est nul. À noter que l’intervalle bien que défini par un carré (s²) peut être négatif, ce qui insiste sur le fait que l’intervalle est bien s² et pas s.
Ceci met en lumière une différence essentielle avec la théorie de Newton; si un point q est séparé par un intervalle de type espace du point p, on ne sait pas dire (indépendamment du système de coordonnées) si q est dans le futur, le passé ou simultané à p.
Pour explorer plus avant la structure de l’espace de Minkowski, il est nécessaire d’introduire les concepts de vecteurs et de tenseurs. Commençons par les vecteurs qui nous sont plus familiers.
Dans notre espace à quatre dimensions les vecteurs auront quatre composantes, et souvent on les appelle des quadri vecteurs. Ceci n’est pas neutre, par exemple il n’existe pas de “ produit vectoriel ” entre deux quadri-vecteurs.
En plus de la dimension, le point important à souligner est que chaque vecteur est localisé à un certain point de l’espace-temps. Nous connaissons bien les vecteurs libres, s’étendant d’un point de l’espace à un autre, que l’on peut translater ad libitum dans l’espace, et les vecteurs liés, s’étendant du point p de l’espace à un autre point q, avec une origine p bien déterminée. Ces concepts ne sont pas utilisés en Relativité.
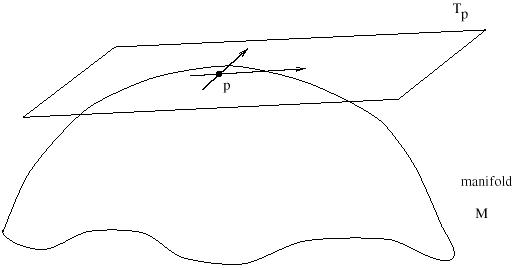
A la place, nous associerons à chaque point p de l’espace-temps, l’ensemble de tous les vecteurs qui passent par ce point, que nous appellerons l’espace tangent à p, soit Tp. Ce nom est inspiré par l’analogie à l’ensemble des vecteurs passant par p qui génèrent le plan tangent en p à une surface à deux dimensions courbée.
Mais inspiration mise à part, l’important est que ces vecteurs soient localisés en un point et ne s’étendent pas d’un point vers un autre (même si pour des raisons de commodité, nous ne nous priverons pas de les représenter sous forme de flèche dans des diagrammes spatio-temporels, la direction est significative, mais la longueur représentant un autre paramètre qu’une mesure de l’espace-temps)
Plus tard nous ferons référence à l’espace tangent à chaque point de quelque chose que nous construirons à partir de l’espace-temps. Pour l’instant, référons-nous à Tp comme à un espace vectoriel défini en chaque point de l’espace-temps.
Un espace vectoriel, rappelons-le, est un ensemble d’objets (vecteurs) qui peuvent être comparés, additionnés (muni d’une structure de groupe) et multipliés par des nombres réels de façon linéaire. Pour deux vecteurs quelconques V et W et des nombres a et b nous avons :
|
(1.22) |
Chaque espace vectoriel a une origine (vecteur nul) qui est l’élément neutre vis-à-vis de l’addition vectorielle. Beaucoup d’espaces vectoriels possèdent aussi un produit scalaire, qui est une fonctionnalité supplémentaire non indispensable.
Un vecteur est un objet géométrique parfaitement défini, comme un champ de vecteurs qui est défini comme un ensemble de vecteurs tel qu’il y ait un vecteur à chaque point de l’espace-temps.
L’ensemble des espaces tangent d’une variété M est appelée le fibré tangent T(M). Cependant, il est souvent utile dans des configurations concrètes de décomposer les vecteurs en composantes conformément à un ensemble de vecteurs de base. Une base est un ensemble de vecteurs qui couvre tout l’espace vectoriel (chaque vecteur est une combinaison linéaire des vecteurs de base) et qui sont linéairement indépendants les uns des autres (aucun n’est une combinaison linéaire des autres). Pour un espace vectoriel donné, il y a une infinité des bases valides, mais chaque base va comporter le même nombre de vecteurs, qui correspond à sa dimension. Pour un espace tangent associé à un point dans l’espace de Minkowski, cette dimension est évidemment quatre.
Supposons que pour chaque espace tangent nous ayons établi une base constituée de 4 vecteurs ê(m) avec m Î{0, 1, 2, 3} comme d’habitude. Faisons correspondre la base aux coordonnées xm, Alors le vecteur de base ê(1) va être porté par l’axe des x, etc.. Même s’il n’est pas nécessaire de choisir la base adaptée au système de coordonnées, c’est souvent bien pratique. Nous pourrions être plus précis ici, mais comme ce point va être examiné plus loin on peut se permettre de rester un peu vague. Chaque vecteur A va être écrit comme une combinaison linéaire des vecteurs de base :
|
(1.23) |
Les coefficients Am sont les composantes du vecteur A. La plupart du temps, on omet la base et on se réfère au vecteur “ Am ”, mais gardons à l’esprit que c’est un raccourci. Le vecteur réel est un objet géométrique, alors que les composantes ne sont que les coefficients des vecteurs de base dans la base choisie. Comme nous omettons les vecteurs de base, les index vont repérer les composantes des vecteurs et tenseurs. Nous avons mis les index entre parenthèses pour les vecteurs de base pour rappeler qu’il s’agit d’un ensemble de vecteurs et non pas des composantes d’un seul vecteur.
Le vecteur tangent à une courbe de l’espace-temps est un
exemple typique de vecteur. Une courbe ou un chemin paramétré
de l’espace-temps est spécifié par ses
coordonnées, fonction d’un paramètre, par exemple
xm
(![]() ).
Le vecteur tangent V(
).
Le vecteur tangent V(![]() )
a les composantes :
)
a les composantes :
|
(1.24) |
Le vecteur lui-même est défini par V = Vm.ê(m)
Une transformation de Lorentz change le coordonnées selon
(1.11) mais laisse le paramètre
![]() en
l’état, nous pouvons donc en déduire que les
composantes du vecteur tangent changent selon :
en
l’état, nous pouvons donc en déduire que les
composantes du vecteur tangent changent selon :
|
(1.25) |
Mais le vecteur reste le même et est donc invariant (contrairement à ses composantes) par la transformation de Lorentz.
Nous pouvons en déduire les propriétés de la transformation des vecteurs de base. Appelons ê(n’) les vecteurs de bases les transformés de la base initiale. Comme le vecteur est invariant nous avons :
|
(1.26) |
Cette relation doit être vérifiée quelle que soit la valeur des composantes Vµ. Nous pouvons donc déduire
|
(1.27) |
On obtient la nouvelle base ê(n’) en multipliant l’ancienne base ê(m) par l’inverse de la transformation de Lorentz Ln’m. Mais l’inverse d’une transformation de Lorentz est une transformation de Lorentz. On peut en adaptant la notation, utiliser les même symboles pour les deux matrices et aboutir à :
|
(1.28) |
Soit :
|
(1.29) |
où drm est le symbole de Kronecker en quatre dimensions. (Schutz utilise une notation différente, en disposant toujours les indices en configuration nord-ouest / sud-est), l’important est de suivre les index primés. La règle de transformation pour les vecteurs de base s’obtient à partir de (1.27).
|
(1.30) |
Nous voyons que les vecteurs de base subissent la transformation de Lorentz inverse de celle des composantes.
Résumons : nous avons introduit les coordonnées repérées par un exposant, qui se transforment d’une certaine manière par la transformation de Lorentz. Ensuite nous avons considéré les composantes d’un vecteur, repérées également par un exposant, ce qui est cohérent puisqu’elles se transforment de la même manière par une transformation de Lorentz. Dans un système fixe de coordonnées, chacune des quatre coordonnées xm peut être considérée comme une fonction dans l’espace-temps, tout comme chacune des composantes d’un champ de vecteurs. Les vecteurs de la base sur laquelle s’appliquent les coordonnées se transforment de façon inverse et sont repérés par un indice. Cette notation garantit que l’objet invariant construit par la sommation des vecteurs de base multipliés par leurs composantes respectives soit inchangé par une transformation (on est parti de là). Fort de ces acquis, nous allons essayer de généraliser cette règle à des objets à index multiples (tenseurs).
A chaque espace vectoriel, correspond un autre espace vectoriel, de même dimension, que nous allons définir qui est appelé espace vectoriel dual.
L’espace vectoriel dual est en général dénoté par un astérisque, et comme on appelle l’espace vectoriel d’origine l’espace Tangent Tp, le dual est appelé l’espace cotangent dénoté T*p. L’espace dual est l’espace vectoriel de toutes les formes linéaires (par des nombres réels) opérées sur l’espace vectoriel original.
En jargon mathématique on dit que si ω ÎTp* est un vecteur dual alors il est une forme linéaire qui satisfait à :
|
(1.31) |
où V, W sont des vecteurs et a, b des nombres réels. La propriété intéressante de ces formes linéaires est qu’elles ont une structure d’espace vectoriel. Alors si ω et h sont des vecteurs duaux nous avons :
|
(1.32) |
Pour rendre cette formulation plus concrète, introduisons un
jeu de vecteurs duaux de base
![]() définis
par
définis
par
|
(1.33) |
À partir de cette base duale, chaque vecteur dual peut être défini par ses composantes, que nous repérerons avec un indice pour respecter la définition (1.33) :
|
(1.34) |
L’analogie avec les vecteurs est parfaite et comme pour eux, nous nous référerons aux vecteurs duaux, de façon abrégée en mentionnant que leurs composantes ωμ.
Il faut mentionner que les vecteurs de l’espace tangent Tp (que nous avons simplement appelés vecteurs) sont également appelés vecteurs contravariants et les vecteurs duaux de l’espace cotangent vecteurs covariants. En fait personne ne s’offusquera si vous désignez les vecteurs ordinaires (ceux dont les composantes ont un exposant) par le simple terme “ vecteur ” et les autres par “ vecteur dual ”.
Un autre nom pour vecteur dual est forme mono linéaire, appelée ci après forme linéaire par défaut (pour les ordres supérieurs on spécifie, bilinéaire,.., multilinéaire) que nous allons expliciter.
La notation simplifiée par la composante permet d’écrire simplement l’action d’un vecteur dual sur un vecteur :
|
(1.35) |
C’est pourquoi il est rarement nécessaire d’inclure explicitement les vecteurs des bases. Les composantes suffisent.
La symétrie de la formule (1.35) suggère que nous pouvons également considérer que les vecteurs sont les formes linéaires des vecteurs duaux en définissant :
|
(1.36) |
Donc espace vectoriel dual du dual d’un espace vectoriel d’origine est l’espace vectoriel d’origine.
Bien sûr, ce qui nous intéresse ce n’est pas un vecteur particulier de l’espace-temps, mais les champs de vecteurs et de vecteurs duaux. L’ensemble des espaces cotangents d'une variété M est appelé le Fibré cotangent, T*(M).)
Ce scalaire peut simplement être interprété comme une “ fonction ” sur l’espace-temps. Un scalaire est une quantité sans index qui est invariante par une transformation de Lorentz.
On peut réutiliser les arguments précédents pour dériver les propriétés de transformation d’un vecteur dual. Ceci donne, pour ses composantes :
|
(1.37) |
Et pour les vecteurs de la base duale,
|
(1.38) |
C’est exactement ce qu’on pouvait escompter, compte tenu de la position des index. Les composantes d’un vecteur dual se transforment par la transformation inverse de celle d’un vecteur. Remarquons que ceci garantit que le scalaire défini par (1.35) est invariant par la transformation de Lorentz, comme ce doit être.
Considérons quelques exemples de vecteurs duaux, d’abord dans un autre contexte, puis dans l’espace de Minkowski. Imaginons l’ espace des vecteurs colonnes à n composantes (n entier).
Alors l’espace dual est l’espace des vecteurs lignes à n composantes et l’opération est celle de multiplication des matrices colonnes (1,n) par les matrices lignes (n,1).
|
(1.39) |
Dans l’espace-temps, l’exemple le plus simple de vecteur dual est le gradient d’une fonction scalaire, l’ensemble des dérivées partielles par rapport aux coordonnées de l’espace-temps, que nous dénotons par “ d ”.
|
(1.40) |
La règle de composition relative à la transformation des dérivées partielles va définir la règle de transformation des composantes d’un vecteur dual :
|
(1.41) |
Où nous avons utilisé (1.11) et (1.28) pour exprimer l’action de la transformation de Lorentz sur les coordonnées.
|
(1.42) |
Soulignons que “ xm ” muni d’un exposant, quand il est au dénominateur d’une dérivée, implique que le résultat est muni d’un indice. Comme je ne suis pas un adepte de la notation avec virgule, nous allons être amenés à utiliser ¶m très souvent. Remarquons que le gradient est un moyen naturel de définir un vecteur tangent à une courbe. Le résultat est la dérivée ordinaire de la fonction le long de la courbe.
|
(1.43) |
Pour en finir avec les vecteurs duaux, il y a une manière de les figurer en respectant la convention traditionnelle de représentation d’un vecteur par une flèche.
Voir à cet effet Schutz, ou MTW (où c’est poussé à l’extrême).
La notion de tenseur résulte d’une généralisation immédiate des vecteurs et vecteurs duaux. De même qu’un vecteur dual est une forme linéaire des vecteurs produisant un scalaire, un tenseur est une forme multilinéaire portant sur des vecteurs et vecteurs duaux et produisant un scalaire.
|
(1.44) |
Ici, “ × ” dénote le produit Cartésien de sorte que par exemple Tp × Tp est l’espace des paires ordonnées de vecteurs. Dire que le tenseur est multilinéaire signifie qu’il agit linéairement sur chacun de ses arguments, par exemple pour un tenseur de type (1, 1), nous avons :
|
(1.45) |
De ce point de vue, un scalaire est un tenseur de type (0, 0), un vecteur est un tenseur de type (1, 0), et un vecteur dual est un tenseur de type (0, 1).
L’espace de tous les tenseurs d’un type donné (k, l) forme un espace vectoriel : les tenseurs de même type peuvent être additionnés entre eux, multipliés par des nombres réels.
Pour construire une base de cet espace vectoriel, nous devons définir une nouvelle opération appelée produit tensoriel dénotée par Ä. Si T est un tenseur de type (k, l) et S un tenseur de type (m, n), nous définissons le tenseur T ÄS de type (k + m, l + n) par :
|
(1.46) |
(Notons que w(i) et V(i) sont des vecteurs duaux et des vecteurs distincts, pas leurs composantes. En d’autres mots commençons par opérer T (on réalise les opérations linéaires décrites précédemment) sur l’ensemble approprié de vecteurs et vecteurs duaux, et ensuite opérons S sur le reste. Notons qu’en général, T ÄS ¹S ÄT.
Il est maintenant immédiat de construire une base pour l’espace des tenseurs (k, l) en effectuant les produits tensoriels des vecteurs de base et des vecteurs de bases duales. Cette base va être constituée des tenseurs de la forme :
|
(1.47) |
Dans un espace-temps à 4 dimensions, il va y avoir 4k + l tenseurs de base en tout. En introduisant les composantes, un tenseur quelconque peut être écrit comme suit :
|
(1.48) |
On peut aussi définir les composantes en opérant le tenseur sur les vecteurs de base des deux types :
|
(1.49) |
On peut facilement vérifier par (1.33) et la suite la consistance de ces équations.
Comme pour les vecteurs nous allons dénoter les tenseurs de façon abrégée par leurs composantes en omettant la base. Le tenseur T est spécifié par ses composantes Tm1 ... mkn1... nk L’opération des tenseurs sur un ensemble de vecteurs et de vecteurs duaux suit le schéma décrit en (1.35) :
|
(1.50) |
L’ordre des index est important, car le tenseur n’opère pas forcément de la même manière sur ses divers arguments. Enfin, la transformation d’un tenseur par une transformation de Lorentz peut se déduire des lois que nous connaissons déjà sur la transformation des vecteurs de base et des vecteurs de bases duales. En suivant la règle de placement des index, on tombe sur la bonne réponse :
|
(1.51) |
Donc, chaque index de type exposant se transforme comme un vecteur, et chaque index de type de type indice comme un vecteur dual.
Bien que nous ayons défini les tenseurs comme des formes multilinéaires de vecteurs et vecteurs duaux, rien ne nous oblige à opérer tous les arguments. Alors un tenseur (1, 1) peut aussi être utilisé comme un opérateur entre vecteurs.
|
(1.52) |
On peut facilement vérifier que TmnVn est un vecteur (c.a.d obéit aux lois de transformation des vecteurs). De même on peut réaliser des opérations tensorielles entre tenseurs pour générer un autre tenseur, par exemple :
|
(1.53) |
On obtient un tenseur (1,1).
Si vous êtes déçus d’avoir passé si peu de temps sur les tenseurs, compte tenu de leur caractère ésotérique, rassurez-vous, leur maîtrise n’est pas bien difficile. Il faut simplement bien respecter la position des index et les manipuler selon les règles indiquées. Certains ouvrages présentent les tenseurs, comme une collection de nombres se transformant selon (1.51). C’est très utile pour la calcul, mais cela ne souligne pas la nature profonde des tenseurs qui sont des objets géométriques indépendants du système de coordonnées choisi.
Il y a pourtant une subtilité que nous avons éludé. Les notions de vecteurs duaux, de tenseurs, de bases et de formes linéaires appartiennent à l’algèbre linéaire, ils sont appropriés sous réserve de disposer d’un espace vectoriel abstrait. Dans le cas qui nous intéresse, nous avons non pas un seul espace vectoriel, mais un espace vectoriel en chaque point. De fait ce seront les champs de tenseurs qui vont surtout nous intéresser, qu’on peut définir comme tenseurs dont les éléments sont des fonctions de l’espace-temps.
Heureusement, toutes les opérations définies précédemment sont formelles, et ne se soucient pas de savoir si nous nous intéressons à un seul espace vectoriel ou à un ensemble d’espaces vectoriels, à savoir un espace vectoriel pour chaque point événement.
Nous allons pouvoir nous en tirer parti en faisant référence à des fonctions de xm chaque fois que ce sera nécessaire. Il faut bien garder à l’esprit l’indépendance logique des notions purement mathématiques que nous avons introduites de leur utilisation dans le cadre de l’espace-temps et de la Relativité (les vecteurs et tenseurs avaient été développés bien avant la Relativité).
Considérons quelques exemples de tenseurs. Commençons par les vecteurs colonnes et leurs duaux les vecteurs lignes.
Dans ce système, un tenseur (1,1) est simplement une matrice Mij.
Ses règles opératoires sur une paire (![]() ,
V) sont identiques à celles de la multiplication des
matrices :
,
V) sont identiques à celles de la multiplication des
matrices :
|
(1.54) |
On peut voir les tenseurs comme des matrices avec un nombre quelconque d’index.
Nous avons déjà rencontré (sans le dire) des exemples de tenseurs dans l’espace-temps.
Le tenseur le plus familier est le tenseur métrique hmn de type (0,2).
L’opération du tenseur métrique sur deux vecteurs est si importante qu’elle mérite son propre nom, le produit scalaire ou produit interne.
|
(1.55) |
Comme dans la géométrie Euclidienne, si le produit scalaire est nul, les vecteurs seront dits orthogonaux. Comme le produit scalaire est un scalaire, il est laissé invariant par des transformations de Lorentz, ce qui a pour conséquence que les vecteurs de base orthogonaux d’un référentiel inertiel Cartésien quelconque restent orthogonaux après une transformation de Lorentz (en dépit du cisaillement mentionné précédemment qui n’est qu’apparent).
La norme d’un vecteur est son auto produit scalaire. À la différence d’un espace Euclidien, la norme n’est pas nécessairement positive.
Si hmn.VmVn < 0, le vecteur Vm est dit de type temps
Si hmn.VmVn = 0, le vecteur Vm est dit de type lumière ou nul
Si hmn.VmVn > 0, le vecteur Vm est dit de type espace
À la différence de la géométrie Euclidienne, la norme d’un vecteur peut être nulle sans que le vecteur le soit. Remarquons que cela rejoint la terminologie que nous avons utilisée précédemment pour classifier les relations entre deux points de l’espace-temps, ce n’est pas fortuit comme nous verrons plus loin.
Un autre tenseur dont nous allons faire un large usage est le tenseur (ou symbole) de Konecker delta dmn, de type (1, 1), dont la composante m,n vaut 1 si m=n et 0 si m¹n et que nous avons déjà décrit.
En relation avec le tenseur métrique, nous définissons le tenseur métrique inverse hmn, tenseur de type (2, 0) :
|
(1.56) |
Vous remarquerez que le tenseur métrique inverse a exactement les mêmes composantes que le tenseur métrique lui-même. Ceci n’est vrai que dans les espaces plats cartésiens et n’est pas du tout le cas d’espaces plus généraux.
Définissons également le tenseur de Levi-Civita de type (0,4)
emnrs = + 1 si mnrs est une permutation paire de 0123
emnrs = - 1 si mnrs est une permutation impaire de 0123 (1.57)
emnrs = 0 autrement
On définit une permutation de “ 0123 ” comme l’opération consistant à permuter (échanger) deux nombres dans cette suite ordonnée de 4 nombres. Si cette opération est répétée un nombre pair de fois, la permutation est dite paire, elle est dite impaire si elle est répétée un nombre impair de fois. Toute autre réarrangement de nombres entre dans la catégorie “autrement ”. Par exemple, e0321 = - 1.
Les tenseurs définis ci-dessus, les tenseurs, métrique, métrique inverse, Kronecker delta, et Levi-Civita ont en commun la propriété remarquable, bien qu’ils se transforment par la loi (1.51) de transformation des tenseurs lors d’un changement de base cartésienne, de conserver leurs composantes inchangées dans n’importe quel système de coordonnées cartésiennes dans un espace-temps plat. C’est un peu un contre exemple, dans la mesure ou la plupart des tenseurs ne possèdent pas cette propriété particulière. En fait, ces tenseurs perdent cette propriété lorsque nous nous plaçons dans des espaces temps plus généraux, à l’exception du Kronecker delta qui conserve exactement les mêmes composantes dans n’importe quel système de coordonnées dans n’importe quel espace-temps.
Ceci s’explique par le fait qu’un tenseur est une forme linéaire, le tenseur Kronecker delta représentant la forme linéaire identité qui transforme un vecteur (simple ou dual) en lui-même, devant avoir les mêmes composantes dans tous les systèmes de coordonnées (quelles que soient ces coordonnées, ce tenseur traduit l’identité entre la source et le produit de la transformation).
Les autres tenseurs (métrique, son inverse, et Levi-Civita caractérisent la structure de l’espace-temps et dépendent tous de la métrique. Nous devons les manipuler avec circonspection hors du domaine des espaces temps plats.
Le tenseur intensité de champ électromagnétique représente un exemple très important de tenseur. Nous savons que le champ électromagnétique peut être représenté par un vecteur champ électrique Ei et un vecteur champ magnétique Bi. (Rappelons que nous avons réservé les indices latins aux composantes d’espace 1,2,3). En fait ce ne sont que des “ vecteurs ” d’espace en ce sens qu’ils sont invariants par des rotations de l’espace, pas par des transformations complètes du groupe de Lorentz. Définissons le tenseur Fmn, de type (0,2) suivant :
|
(1.58) |
De cette définition nous savons transformer les champs électromagnétiques présents dans un référentiel dans un autre en utilisant (1.51).
Le formalisme tensoriel nous apporte un moyen puissant d’unification. Plutôt qu’utiliser deux vecteurs différents dont les relations et les lois de transformation sont mystérieuses, nous avons maintenant un seul tenseur qui synthétise la description du champ électromagnétique. D’un autre côté, ne soyons pas aussi radical, il est quelquefois utile dans un système de coordonnées défini de travailler sur les vecteurs électriques et magnétiques.
Avec ces exemples sous la main, poursuivons notre examen des propriétés des tenseurs. Considérons l’opération de contraction d’un tenseur qui transforme un tenseur (k, l) en un tenseur (k - 1, l - 1). La contraction s’obtient en sommant un index haut (exposant) sur un index bas (indice) ou vice versa.
|
(1.59) |
On peut vérifier que le résultat est un tenseur parfaitement défini. Remarquons, que nous ne pouvons contracter un exposant qu’avec un indice (et vice versa), on ne peut pas le faire entre deux index de même type. L’ordre également importe, on peut obtenir différents tenseurs en les contractant différemment :
|
(1.60) |
en général.
Le tenseur métrique et inverse métrique sont très
utiles pour respectivement abaisser et élever des index
sur les tenseurs. Soit le tenseur T![]() bgd
nous pouvons utiliser la métrique pour définir
de nouveaux tenseurs que nous choisissons de dénoter par la
même lettre T :
bgd
nous pouvons utiliser la métrique pour définir
de nouveaux tenseurs que nous choisissons de dénoter par la
même lettre T :
|
(1.61) |
Et ainsi de suite. Notons que élever ou abaisser des index ne change pas la position des autres index non sommés. Les indices libres (non sommés) doivent être les mêmes des deux côtés de l’équation alors que l’indice neutre de sommation est arbitraire et n’apparaît que d’un côté.
On peut ainsi transformer des vecteurs duaux en vecteurs et réciproquement par ces opérations :
|
(1.62) |
Ceci explique pourquoi le gradient dans un espace Euclidien tridimensionnel est considéré comme un vecteur alors qu’en fait c’est un vecteur dual. Dans un espace Euclidien où la métrique est la matrice diagonale Identité, un vecteur dual se transforme en un vecteur avec exactement les mêmes composantes d’où l’amalgame, (à noter que ceci est une propriété de tous les espaces strictement Euclidiens à base cartésienne, quels que soient leur dimension, on dit aussi que les composantes contravariantes et covariantes, d’un vecteur, sont les mêmes). On peut se demander alors pourquoi on fait toute une montagne de cette distinction. C’est simplement que dans un espace Lorentzien, ceci n’est plus vrai :
|
(1.63) |
Dans les espaces courbes, où la métrique est plus complexe la différence devient très significative. Mais il y a une raison plus profonde, à savoir que les tenseurs ont une définition naturelle qui est indépendante de la métrique. Même si nous allons toujours avoir une métrique disponible, il est essentiel d’être conscient de la nature des objets mathématiques que nous introduisons. Le gradient et son action sont parfaitement définis indépendamment d’une quelconque métrique, tandis qu’un “ gradient avec exposants ” ne l’est pas. À titre d’exemple, nous pourrions prendre les variations de fonctions par rapport à la métrique et en conséquence avoir à connaître exactement comment ces fonctions dépendent de la métrique, c.a.d quelque chose de rendu obscur par la notation indicielle.
En poursuivant d’explorer le jargon tensoriel, nous en venons aux tenseurs symétriques par rapport à certains indices ou exposants qui ont la propriété de rester invariants si on échange ces dits indices entre eux ou ces dits exposants entre eux. Alors si :
|
(1.64) |
Nous dirons que Smnr est symétrique dans ses deux premiers index tandis que si :
|
(1.65) |
Nous dirons que Smnr est symétrique pour ses trois index.
Un tenseur est dit antisymétrique
Par rapport à certains index s’il se transforme en son opposé quand on échange ces index, alors :
|
(1.66) |
Signifie que Amnr est antisymétrique par rapport à son premier et troisième index ou plus simplement par rapport à m et r. Si un tenseur est (anti)symétrique par rapport à tous ses indices, on s’y référera en le qualifiant simplement de (anti)symétrique. Le tenseur métrique hmn et son inverse hmn sont des exemples de tenseurs symétriques alors que le tenseur de Levi-Civita emnrs et le tenseur d’intensité de champ électromagnétique Fmn sont antisymétriques.
Vous pouvez vérifier que si vous élevez ou abaissez des index (anti)symétriques ils conservent leur attribut initial. Remarquons que cela n’a pas de sens d’échanger un index haut avec un index bas, donc ne succombons pas à la tentation de dire que le symbole de Kronecker dab est symétrique. Par contre, le fait qu’abaisser un index sur dab donne un tenseur symétrique (le tenseur métrique), signifie que l’ordre des index est indifférent, ce qui explique pourquoi on n’indique pas d’ordre d’index dans ce tenseur particulier.
On peut symétriser un nombre quelconque d’index hauts ou bas dans un tenseur. Pour cela on fait la somme des tenseurs issus par toutes les permutations des index concernés et on divise par le nombre de termes :
|
(1.67) |
Pour un tenseur antisymétrique on remplace la somme par la somme alternée :
|
(1.68) |
Par somme alternée, on entend que les permutations issues d’un nombre impair d’échanges sont affectées du signe “ moins ”, soit :
|
(1.69) |
Notons que les parenthèses/ crochets dénotent la symétrisation/antisymétrisation. De plus nous pouvons être amenés à vouloir (anti)symétriser des index non contigus, auquel cas on utilise la barre verticale pour isoler les index exclus de la somme :
|
(1.70) |
Finalement, certains utilisent une convention qui omet le facteur 1/n!. Notre convention est satisfaisante, car (par exemple) un tenseur symétrique satisfait :
|
(1.71) |
Et de même pour les tenseurs antisymétriques.
Nous nous sommes attachés à bien distinguer ce qui est toujours vrai (dans une Variété munie d’une métrique quelconque) de ce qui est seulement vrai dans l’espace-temps de Minkowski en coordonnées Cartésiennes. Une des différences les plus importantes concerne les dérivées partielles.
En coordonnées Cartésiennes, dans un espace plat, la dérivée partielle d’un tenseur (k, l), est un tenseur (k, l + 1) tel que :
|
(1.72) |
Il conserve sa forme tensorielle par une transformation de Lorentz. Cela n’est pas vrai dans un espace-temps quelconque où nous allons devoir définir une dérivée covariante à substituer à la dérivée partielle. Pourtant nous allons utiliser le fait que la dérivée partielle donne un tenseur dans ce cas particulier, tant que nous resterons dans ce contexte. La seule exception à cet avertissement est la dérivée partielle d’un scalaire ¶af, qui est un tenseur pur et dur (le gradient) dans tous les espaces temps.
Nous en savons maintenant assez pour montrer comment nous pouvons utiliser ces concepts concrètement en physique. Commençons par les équations de Maxwell de l’électromagnétisme. Avec la notation en vigueur au 19 ième siècle, elles s’écrivaient :
|
(1.73) |
Ici, E et B sont les tri vecteurs champ électrique
et champ magnétique, J est le courant, r
est la densité de charge
et
![]() ×
et
×
et
![]() .
Représentent le rotationnel et la divergence.
.
Représentent le rotationnel et la divergence.
Ces équations doivent être invariantes par une transformation de Lorentz, et c’est ainsi que tout a commencé. Leur invariance ne saute pas aux yeux, mais notre notation tensorielle va régler ce point. Commençons par écrire ces équations en adaptant légèrement la notation.
|
(1.74) |
Dans ces expressions, nous nous sommes permis d’élever et d’abaisser les index spatiaux, sans se soucier de la métrique et de son inverse du fait que dans un espace euclidien 3D de métrique dij, cela ne change pas les composantes. Nous avons défini le tenseur de Levi-Civita eijk comme dans l’espace-temps à quatre dimensions, mais avec un index de moins.
Nous avons remplacé la densité de charge par J0; ce qui est légitime puisque cette densité et le courant forment le quadri-vecteur courant, Jm = (r, J1, J2, J3).
De ces expressions et de la définition (1.58) du tenseur intensité de champ Fmn, il est facile de donner la version tensorielle contemporaine des équations de Maxwell. Commençons par remarquer qu’on peut exprimer le tenseur intensité de champ avec exposants comme suit :
|
(1.75) |
Pour vérifier, notez que par exemple F01 = h00h11 F01 et F12 = e123 B3. Alors la deuxième équation dans (1.74) devient :
|
(1.76) |
Et en utilisant l’antisymétrie de Fmn, nous voyons que nous pouvons combiner les éléments des deux premières équations dans une seule équation tensorielle
|
(1.77) |
Un raisonnement similaire (que nous vous laissons le soin de conduire) permet de déduire la troisième et quatrième équation de (1.74) qui peuvent s’écrire :
|
(1.78) |
Ainsi nous avons remplacé les quatre équations originales Maxwell par seulement deux, démontrant, l’économie de la notation tensorielle. Plus important, comme les deux membres des équations (1.77) et (1.78) sont des tenseurs, donc si elles sont vraies dans un système inertiel elles sont vraies dans tous, quelle que soit la transformation de Lorentz opérée.
C’est pourquoi les tenseurs sont si utiles en Relativité, où nous voulons très souvent exprimer les relations indépendamment d’un référentiel particulier, ce qui nécessite que les deux membres des relations se transforment de la même manière quand on opère un changement de coordonnées.
Dans notre jargon on dira de relations écrites sous forme de tenseurs qu’elles sont covariantes (ce qui dans ce contexte est différent de l’utilisation du même terme qui s’oppose à “ contravariant ”)
Nous dirons donc que (1.77) et (1.78) ensembles, sont la forme covariante des équations de Maxwell tandis que (1.73) ou (1.74) est la forme non covariante.
Introduisons maintenant une nouvelle classe de tenseurs, appelé formes différentielles. Une forme différentielle de type p que nous appellerons une forme p-linéaire différentielle ou en abrégé p-forme ou p-forme différentielle est un tenseur (0, p), qui est complètement anti-symétrique.
La terminologie prête à confusion avec ce qui à été dit avant, sachant qu’une forme linéaire quelconque n’est pas généralement ni antisymétrique ni symétrique. Il s’agit ici d’une classe de formes linéaires particulières. On essaiera dans la mesure du possible de spécifier “ forme différentielle ” si c’est le cas. Maintenant le terme “ forme ” étant utilisé à toutes les sauces, des confusions et des erreurs dans ce texte, ne sont pas exclues, la plus grande vigilance s’impose.
Rappelons que les scalaires sont des 0-formes, les vecteurs duaux des formes (mono)linéaires, cette terminologie sera explicité plus loin. Nous avons des formes bilinéaires différentielles Fmn, des formes quadrilinéaires différentielles emnrs. L’espace de toutes les formes p-linéaires différentielles est dénoté Lp, et l’espace des champs de formes p-linéaires différentielles sur une Variété M est dénoté Lp (M). Un exercice quasi immédiat en combinatoire, montre que le nombre de formes p-linéaires différentielles linéairement indépendantes (caractérisant sa dimension), sur un espace vectoriel à n dimensions est n!/(p!(n - p)!). Donc, en un point d’un espace-temps à quatre dimensions, il y a une 0-forme différentielle (scalaire) indépendante, quatre formes linéaires différentielles, six formes bilinéaires différentielles, quatre formes trilinéaires différentielles, et une forme quadrilinéaire différentielle.
Il n’y pas de formes p-linéaires différentielles pour p > n, car toutes les composantes sont nulles pour satisfaire l’antisymétrie.
Pourquoi nous intéresser aux formes différentielles ? Bonne question, mais dont la réponse mérite un complément d’étude. L’idée de base est que ces formes peuvent être à la fois différentiées et intégrées sans avoir besoin de faire référence à une quelconque structure géométrique. Pour l’intégration nous verrons plus tard, regardons la différentiation.
Soit une forme p-linéaire A et une
forme q-linéaire B, nous pouvons construire une
(p + q)-forme différentielle appelée le
produit extérieur A
![]() B
en antisymétrisant le produit des tenseurs A et B :
B
en antisymétrisant le produit des tenseurs A et B :
|
(1.79) |
Par exemple pour deux formes (mono)linéaires cela donne :
|
(1.80) |
Remarquons que :
|
(1.81) |
Donc nous pouvons modifier l’ordre d’un produit extérieur sous réserve d’être attentifs aux signes.
La dérivée “ extérieure ” “ d ” nous permet de différentier des champs de formes p-linéaires pour obtenir des champs de (p + 1)-formes différentielles. Elle est définie comme une dérivée anti-symétrique partielle convenablement normalisée.
|
(1.82) |
L’exemple le plus simple est le gradient qui est la dérivée extérieure d’une 0-forme linéaire (scalaire) :
|
(1.83) |
La raison qui mobilise notre attention sur cette dérivée extérieure, est qu’elle est un tenseur, même dans des espaces courbes, à la différence de sa cousine la dérivée partielle. Comme nous n’avons pas encore étudié les espaces courbes, nous ne le prouverons pas, mais (1.82) définit un tenseur tout à fait convenable et ce quelle que soient la métrique et les coordonnées.
Un autre intérêt de la dérivée extérieure est que pour une forme linéaire quelconque A
|
(1.84) |
Qui est souvent écrit d2 = 0. Cette identité est la conséquence de la définition de d et du fait que les dérivées partielles commutent, ¶a¶b= ¶b¶a (appliqué à n’importe quoi).
Ceci nous conduit à un aparté mathématique, que nous allons développer par gourmandise. Nous dirons qu’une forme p-linéaire A est fermée si dA = 0, et exacte si A = dB pour une (p - 1)-forme B. Évidemment toutes les formes exactes sont fermées, mais la réciproque n’est pas forcément vraie. Sur une variété M, les formes p-linéaires fermées génèrent un espace vectoriel Zp(M), et les formes exactes un espace vectoriel Bp(M). Définissons un nouvel espace vectoriel comme l’espace vectoriel des formes fermées modulo les formes exactes :
|
(1.85) |
Ceci est appelé l’espace vectoriel de cohomologie
de Rahm de rang p, et ne dépend que de la topologie de
la Variété M. L’espace de Minkowski
à une topologie de type R4, totalement
inintéressante, telle que tous les Hp(M)
s’annulent pour p > 0. Pour p = 0, nous
avons H0(M) =
![]() .
Donc, dans l’espace de Minkowski toutes les formes fermées
sont des formes exactes sauf pour les zéro-formes (scalaires)
Les zéro-formes ne peuvent pas être exactes car il
n’y a pas de formes de rang inférieur (-1 forme)dont
elles seraient les dérivées extérieures.
Il est frappant de voir que l’information sur la topologie peut
être extraite de cette manière, qui n’invoque que
des solutions d’équations différentielles.
.
Donc, dans l’espace de Minkowski toutes les formes fermées
sont des formes exactes sauf pour les zéro-formes (scalaires)
Les zéro-formes ne peuvent pas être exactes car il
n’y a pas de formes de rang inférieur (-1 forme)dont
elles seraient les dérivées extérieures.
Il est frappant de voir que l’information sur la topologie peut
être extraite de cette manière, qui n’invoque que
des solutions d’équations différentielles.
La dimension bp de l’espace Hp(M) est appelée la nombre de rang p de Betti sur M, et la caractéristique d’Euler est donnée par la somme alternée :
|
(1.86) |
La théorie Cohomologique est une des bases importantes de la topologie différentielle moderne.
Revenons sur terre, la dernière opération que nous allons introduire sur les formes différentielles est la dualité de Hodge. Nous définissons “ l’opérateur noté “ étoile ” de Hodge ” sur une Variété de dimension n comme une application de formes p-linéaires vers (n - p)-formes,
|
(1.87) |
reliant A à “ A dual ”. A la différence des autres opérations sur les formes, le dual de Hodge dépend de la métrique de la Variété, ce qui est évident du fait que nous avons du élever certains index sur le tenseur de Levi-Civita pour définir (1.87). Si on applique deux fois l’opérateur de dualité de Hodge on retombe sur la forme initiale affectée du signe plus ou moins.
|
(1.88) |
Où s est le nombre de signes moins dans les valeurs propres de la métrique. Pour l’espace de Minkowski, s = 1.
Deux remarques sur la dualité de Hodge.
D’abord la dualité dans le sens de Hodge est différente de celle qui lie un vecteur avec son dual., bien que les deux peuvent être interprétés comme l’espace des formes linéaires de l’espace original vers R. Remarquons que la dimension de l’espace des (n - p)-formes différentielles est égale à celle des p-formes différentielles, donc ceci a au moins une chance d’être vrai. Dans le cas des formes différentielles, la forme multilinéaire différentielle définie par une (n - p)-forme différentielle s’appliquant sur une forme p-linéaire différentielle est donnée par le dual du produit extérieur des deux formes différentielles. Alors si A(n - p) est une (n - p)-forme différentielle et B(p) est une forme p-linéaire différentielle, en un point de l’espace-temps nous avons :
|
(1.89) |
Ensuite, concernant les formes différentielles dans un espace Euclidien 3D, la dualité de Hodge d’un produit extérieur de formes linéaires donne une autre forme linéaire différentielle :
|
(1.90) |
Tous les pré facteurs s’annulent. Comme les formes (mono)linéaires de l’espace Euclidien sont des vecteurs, le produit extérieur des deux vecteurs est un vecteur qui est en fait le résultat du produit vectoriel classique. La constitution du tenseur de Levi-Civita explique pourquoi le produit vectoriel change de signe par parité quand on échange deux coordonnées ou ce qui est équivalent deux vecteurs de base. C’est pourquoi le produit vectoriel n’existe qu’en trois dimensions, en effet en trois dimensions nous avons une application intéressante de deux vecteurs duaux vers un troisième vecteur dual. On pourrait aussi définir une application de n - 1 formes linéaires vers une seule forme linéaire différentielle, opération dont l’intérêt reste à montrer.
L’électrodynamique nous fournit un bel exemple d’utilisation obligée des formes différentielles. De par la définition de la dérivée extérieure, il est clair que l’équation (1.78) peut être exprimée comme la fermeture de la forme bilinéaire Fmn :
|
(1.91) |
Cela signifie-t-il que F est aussi exact ? Oui, car nous avons noté que l’espace de Minkowski est muni d’une topologie triviale, donc toutes les formes fermées sont exactes. Il doit donc exister une forme linéaire Am telle que :
|
(1.92) |
Cette forme linéaire est le potentiel vecteur de l’électromagnétisme bien connu, dont la composante 0 est donnée par le potentiel scalaire, A0 = f. Si on suppose que Am est le champ fondamental de l’électromagnétisme, alors (1.91) en est dérivé en tant qu’identité (à la différence d’une loi dynamique, d’une équation du mouvement).
L’invariance de jauge s’exprime par le fait que la
théorie est invariante si A
![]() A
+ d
A
+ d![]() pour un scalaire (zéro-forme)
pour un scalaire (zéro-forme)
![]() ,
ceci étant immédiat d’après la relation
(1.92). L’autre des équations de Maxwell (1.77),
peut être exprimée par une équation entre formes
tri linéaires.
,
ceci étant immédiat d’après la relation
(1.92). L’autre des équations de Maxwell (1.77),
peut être exprimée par une équation entre formes
tri linéaires.
|
(1.93) |
Ou la forme linéaire représentant le courant J est juste le quadrivecteur courant dont on a abaissé les index. Pour les détails, à vous de jouer.
Il est étrange de constater que la dualité de Hodge est à la base d’un des sujets les plus brûlants de la physique contemporaine. Difficile de ne pas remarquer que les équations (1.91) et (1.93) se ressemblent. En fait si nous posons Jm = 0, les équations sont invariantes par la transformation duale.
|
(1.94) |
Ce qui nous permet d’affirmer que dans le vide, les équations
de Maxwell sont invariantes par cette dualité, invariance
compromise par la présence de charges. On peut imaginer
que les monopoles magnétiques à l’instar des
monopoles électriques existent dans la nature. Nous pouvons
ajouter un terme de courant magnétique 4![]() (*JM)
dans le membre de droite de (1.91), rendant les équations
invariantes par application de la relation de dualité et le
remplacement J
(*JM)
dans le membre de droite de (1.91), rendant les équations
invariantes par application de la relation de dualité et le
remplacement J
![]() JM.
(Évidemment, le membre de droite de (1.91) non nul est
incompatible avec F = dA, donc l’idée
n’est valable que si Am
n’est pas une variable fondamentale.). Il y a longtemps, Dirac
émit l’hypothèse de monopoles magnétiques
et montra qu’une condition nécessaire de leur existence
est que la charge fondamentale du monopole soit inversement
proportionnelle à la charge électrique fondamentale. La
charge fondamentale électrique est un nombre petit,
l’électrodynamique est faiblement couplée, et
c’est pour cela que la théorie des perturbations est si
efficace en électrodynamique quantique (QED). Mais la
condition posée par Dirac sur les charges magnétiques
implique que la transformation duale va transformer la théorie
faiblement couplée des charges électriques en une
théorie fortement couplée de monopoles magnétiques
(et vice versa). Malheureusement les monopoles magnétiques
n’existent pas, pour autant que nous le sachions, donc ces
idées ne sont pas directement applicables à
l’électromagnétisme, mais il y a des théories
(comme les théories de jauge super symétriques non
abéliennes) où il a été conjecturé
que une sorte de dualité de symétrie pouvait
exister. Si c’est le cas, nous aurions l’opportunité
d’analyser une théorie de couplage fort (et difficile à
résoudre) par examen de sa théorie duale faiblement
couplée.
JM.
(Évidemment, le membre de droite de (1.91) non nul est
incompatible avec F = dA, donc l’idée
n’est valable que si Am
n’est pas une variable fondamentale.). Il y a longtemps, Dirac
émit l’hypothèse de monopoles magnétiques
et montra qu’une condition nécessaire de leur existence
est que la charge fondamentale du monopole soit inversement
proportionnelle à la charge électrique fondamentale. La
charge fondamentale électrique est un nombre petit,
l’électrodynamique est faiblement couplée, et
c’est pour cela que la théorie des perturbations est si
efficace en électrodynamique quantique (QED). Mais la
condition posée par Dirac sur les charges magnétiques
implique que la transformation duale va transformer la théorie
faiblement couplée des charges électriques en une
théorie fortement couplée de monopoles magnétiques
(et vice versa). Malheureusement les monopoles magnétiques
n’existent pas, pour autant que nous le sachions, donc ces
idées ne sont pas directement applicables à
l’électromagnétisme, mais il y a des théories
(comme les théories de jauge super symétriques non
abéliennes) où il a été conjecturé
que une sorte de dualité de symétrie pouvait
exister. Si c’est le cas, nous aurions l’opportunité
d’analyser une théorie de couplage fort (et difficile à
résoudre) par examen de sa théorie duale faiblement
couplée.
Récemment, les travaux de Seiberg et Witten et d’autres ont prouvé que c’est exactement ce qui se passe dans certaines théories. L’espoir est que ces techniques vont nous permettre d’explorer certains phénomènes qui existent dans les théories de champs quantiques fortement couplées, telles que le confinement des quarks en Hadrons.
Nous avons fait le tour de ce que nous avons à savoir sur les manipulations et les applications des tenseurs. Dans le chapitre suivant nous approfondirons et préciserons les définitions rigoureuses des Variétés et des tenseurs, dont nous avons bien dégrossi les contours. Avant de se plonger dans des mathématiques plus abstraites, regardons comment la physique se comporte dans un espace-temps de Minkowski.
Démarrons avec la ligne d’univers d’une particule
unique. Elle est spécifiée par une application de
![]()
![]() M,
où M est la variété représentant
l’espace-temps. Nous définissons le chemin par une
courbe paramétrée xm
(
M,
où M est la variété représentant
l’espace-temps. Nous définissons le chemin par une
courbe paramétrée xm
(![]() ).
Comme indiqué avant, le vecteur tangent à ce chemin est
dxm/d
).
Comme indiqué avant, le vecteur tangent à ce chemin est
dxm/d![]() .
Remarquons qu’il dépend du paramétrage. Un objet
qui nous intéresse au premier chef, est la norme du vecteur
tangent, qui sert à caractériser le chemin. Si le
vecteur est de type temps, nul ou espace pour une certaine valeur
de
.
Remarquons qu’il dépend du paramétrage. Un objet
qui nous intéresse au premier chef, est la norme du vecteur
tangent, qui sert à caractériser le chemin. Si le
vecteur est de type temps, nul ou espace pour une certaine valeur
de
![]() ,
nous dirons que le chemin est de type temps, nul ou espace en ce
point. Ce qui explique que les mêmes termes sont utilisés
pour classer les vecteurs dans l’espace tangent et les
intervalles entre deux points est, qu’une droite reliant disons
deux points dont l’intervalle est de type temps va être,
elle-même de type temps en chaque point du chemin.
,
nous dirons que le chemin est de type temps, nul ou espace en ce
point. Ce qui explique que les mêmes termes sont utilisés
pour classer les vecteurs dans l’espace tangent et les
intervalles entre deux points est, qu’une droite reliant disons
deux points dont l’intervalle est de type temps va être,
elle-même de type temps en chaque point du chemin.
Néanmoins, il faut être bien conscient du petit tour de passe passe que nous faisons ici. La métrique en tant que tenseur (0,2), est un outil qui opère sur deux vecteurs (ou deux copies du même) pour produire un nombre. Il est donc naturel de classer les vecteurs tangents en fonction de leur norme. Par contre l’intervalle entre deux points n’est pas quelque chose d’aussi naturel, il dépend du chemin choisi (la “ ligne droite ”) qui relie les deux points. Nous avons implicitement supposé que, dans notre contexte, l’espace-temps est plat (ce qui dans ce cas, n’autorise qu’un seul chemin entre deux points).
Un objet plus naturel est l’élément différentiel ou intervalle infinitésimal :
|
(1.95) |
De cette définition, on est tenté d’en prendre la racine carrée et de l’intégrer le long du chemin pour obtenir un intervalle fini. Mais comme ds2 n’est pas nécessairement positif, nous devons définir différentes procédures adaptées aux différents cas.
Pour les intervalles de type espace nous définissons la longueur du chemin :
|
(1.96) |
Ou l’intégrale est prise sur le chemin. Pour les chemins de type nul (lumière) l’intervalle est nul donc pas besoin de formule particulière, pour les intervalles de type temps nous définissons le temps propre.
|
(1.97) |
Qui va être positif. Nous pourrions aussi considérer des chemins mixtes, temporels à certains endroits, spatiaux à d’autres. Par chance c’est rarement nécessaire, car les particules physiques suivent des chemins qui ne changent jamais de type. Les particules à masse (au repos) non nulle suivent des chemins de type temps et les particules sans masse (au repos) comme les photons suivent des chemins de type nul.
De plus le terme “ temps propre ”
![]() est
particulièrement bien choisi, car il rend compte du temps
écoulé mesuré par une horloge physique qu’on
déplacerait sur la trajectoire. Ce point de vue, permet de
comprendre les paradoxes des jumeaux ou d’autres énigmes
similaires. Deux lignes d’univers, non nécessairement
droites qui se coupent en deux points événements de
l’espace-temps ont des temps propres mesurés par
l’intégrale (1.97) le long des chemins correspondants et
ces deux nombres ne seront pas nécessairement égaux
même si les deux voyageurs qui les empruntent sont nés
le même jour.
est
particulièrement bien choisi, car il rend compte du temps
écoulé mesuré par une horloge physique qu’on
déplacerait sur la trajectoire. Ce point de vue, permet de
comprendre les paradoxes des jumeaux ou d’autres énigmes
similaires. Deux lignes d’univers, non nécessairement
droites qui se coupent en deux points événements de
l’espace-temps ont des temps propres mesurés par
l’intégrale (1.97) le long des chemins correspondants et
ces deux nombres ne seront pas nécessairement égaux
même si les deux voyageurs qui les empruntent sont nés
le même jour.
Considérons le cas des chemins suivis par les particules massives (qui sont toujours de type temps) Comme le temps propre est mesuré par une horloge voyageant sur une ligne d’univers de type temps, il est naturel d’utiliser τ comme paramètre affine du chemin.
Alors, nous utiliserons (1.97) pour calculer τ (λ), qui (si λ est un bon paramètre en premier lieu) nous permet d’obtenir λ(τ) par inversion de la fonction, ce qui nous permet de définir le chemin par xm(τ).
Le vecteur tangent dans ce paramétrage est appelé la quadrivitesse, Um :
|
(1.98) |
Comme dt² = - hmn dxmdxn, la quadrivitesse est naturellement normalisée.
|
(1.99) |
Elle sera toujours négative, car nous ne la définissons que pour des chemins de type temps. On peut définir un vecteur similaire pour les chemins de type espace. Les chemins de type lumière posent un problème du fait que la norme est nulle. Dans le référentiel inertiel lié à la particule (dans lequel elle est au repos et que appelle “ référentiel repos”), la quadri vitesse n’a que la composante de temps non nulle : Um = (1, 0, 0, 0).
Le quadri vecteur énergie-impulsiony est directement lié, il est défini par :
|
(1.100) |
où m est la masse de la particule. La masse est
une quantité fixe indépendante du référentiel
inertiel (c’est un invariant relativiste), qui est appelée
“ masse au repos” dans certains ouvrages. Il vaut
mieux éviter cette terminologie qui prête à
confusion. En fait cette invariance de la masse est simplement liée
au fait que hmn
pmpn,
(produit scalaire du quadrivecteur énergie-impulsion pµ
avec lui-même dans un espace-temps de Minkowski) est un
scalaire, donc un invariant relativiste et qu’il vaut
précisément m²c4,
(comme c est constant, m doit aussi
l’être). L’énergie de la particule
est alors simplement p0, la
composante temporelle de son vecteur énergie-impulsion. Comme
elle ne représente qu’une composante d’un
quadrivecteur, elle n’est pas invariante par une transformation
de Lorentz, comme prévu puisque l’énergie d’une
particule en mouvement n’est pas la même que celle de la
même particule au repos. Dans le référentiel
repos de la particule, nous avons p0 = m,
rappelons que nous avons posé c = 1,
ainsi nous retrouvons l’équation qui a rendu Einstein
célèbre : E = mc2.
Les équations du champ de la Relativité générale
sont bien plus importantes, mais “ Rmn
-
1/2.Rgmn
= 8![]() GTmn“
ne suscitent pas la même émotion que “ E
= mc2 ”. Dans un référentiel
en mouvement, nous pouvons trouver les composantes de pm
en réalisant une transformation de Lorentz. Pour une particule
de déplaçant avec une tri-vitesse v selon l’axe
des x nous avons :
GTmn“
ne suscitent pas la même émotion que “ E
= mc2 ”. Dans un référentiel
en mouvement, nous pouvons trouver les composantes de pm
en réalisant une transformation de Lorentz. Pour une particule
de déplaçant avec une tri-vitesse v selon l’axe
des x nous avons :
|
(1.101) |
où
g=
(1-v²) -1/2. Pour v petit cela donne p0
= m +
1/2.mv2 (ce qu’on interprète comme
l’énergie au repos plus l’énergie
cinétique) et p1 = mv (ce qu’on
interprète généralement comme l’impulsion
Newtonienne). C’est pourquoi le vecteur énergie-impulsion
a été ainsi nommé. La pièce maîtresse
de la physique pré-relativiste est la deuxième loi de
Newton :
![]() =
m
=
m![]() = dp/dt.
Une équation analogue doit exister en RR mais sous forme
tensorielle.
= dp/dt.
Une équation analogue doit exister en RR mais sous forme
tensorielle.
Cela nous conduit à introduire un quadrivecteur force f m satisfaisant :
|
(1.102) |
L’exemple de force le plus simple en mécanique
Newtonienne est la force gravitationnelle. En Relativité, la
gravitation n’est pas décrite par une force mais par la
courbure de l’espace-temps lui-même. Considérons
donc l’électromagnétisme. La force de Lorentz
tridimensionnelle est donnée par
![]() =
q(
=
q(![]() +
+
![]() ×
×
![]() ),
où q est la charge de la particule. Nous voudrions
généraliser sous forme tensorielle cette équation.
Il apparaît qu’il n’y a qu’une seule
possibilité :
),
où q est la charge de la particule. Nous voudrions
généraliser sous forme tensorielle cette équation.
Il apparaît qu’il n’y a qu’une seule
possibilité :
|
(1.103) |
Vous pouvez vérifier qu’on retrouve à la limite, la forme de Newton pour les faibles vitesses. Remarquons que la contrainte d’écriture sous forme tensorielle pour assurer l’invariance de Lorentz, restreint sérieusement les possibilités d’expression de l’équation. C’est un exemple d’un phénomène très général. Alors qu’il semble qu’il y ait des possibilités très diverses pour des lois physiques, quelques contraintes liées à une exigence de symétrie les réduisent à un seul choix. Bien que pm offre une description complète de l’énergie et de l’impulsion d’une particule, nous allons introduire afin d’étendre la portée de nos investigations, le tenseur énergie-impulsion Tmn
C’est un tenseur (2, 0) symétrique qui va nous indiquer tout ce que nous devons savoir sur ce qui est lié à l’énergie d’un système : densité d’énergie; pression, impulsion etc.. Une définition générale de Tmn est le flux de la quadri-impulsion pm à travers une surface définie par xn constant.
Pour concrétiser, considérons un fluide qui est une catégorie de matière, un continuum de matière caractérisé par des paramètres macroscopiques tels que la température, la pression, l’entropie, la viscosité, etc..
En relativité Générale, nous nous intéresserons particulièrement aux fluides parfaits, dans lesquels sont inclus, du moins à cette échelle, les champs électromagnétiques, les étoiles, et l’univers dans son entier. Schutz définit un fluide parfait comme n’ayant pas de conduction thermique et pas de viscosité alors que Weinberg le définit comme un fluide isotrope dans son référentiel repos. Il s’avère que ces deux points de vue sont équivalents. De façon opératoire, on peut considérer qu’un fluide parfait est totalement caractérisé par sa pression et sa densité.
Pour comprendre ce qu’est un fluide parfait, commençons par l’exemple le plus simple : la poussière. La poussière est défini comme un ensemble de particules, en repos relatif, où également comme un fluide parfait de pression nulle. Comme toutes les particules ont la même vitesse quel que soit le référentiel inertiel, on peut considérer un “ champ de quadri vitesse “ Um (x) défini dans tout l’espace-temps. En fait ses composantes sont identiques en tout point.
Définissons le quadrivecteur numérique de flux comme :
|
(1.104) |
Où n est la densité numérique des particules mesurées dans leur référentiel repos. Alors N0 est la densité numérique mesurée dans un autre référentiel, tandis que Ni est le flux de particules dans la direction xi. Supposons que les particules aient la même masse m. Alors dans le référentiel repos la densité d’énergie de la poussière est donnée par :
|
(1.105) |
Par définition, la densité d’énergie spécifie complètement la poussière. Mais r ne mesure que la densité d’énergie dans le référentiel repos, qu’en est il des autres référentiels? Nous remarquons que n et m sont tous deux les composantes 0 de quadrivecteurs dans leur référentiel repos, respectivement, Nm = (n, 0, 0, 0) et pm = (m, 0, 0, 0). Donc r est la composante m = 0, n = 0 du tenseur p Ä N mesurée dans le référentiel repos.
Nous définissons donc le tenseur énergie-impulsion de la poussière par :
|
(1.106) |
Où r désigne la densité d’énergie dans le référentiel repos. Le cas, de la poussière, réglé, nous allons considérer les fluides parfaits. Rappelons que parfait signifie “ isotrope ” dans le référentiel repos. Ceci implique que Tmn est diagonal - Les composantes de l’impulsion ne génèrent pas de flux dans une direction qui leur sont orthogonales. De plus les composantes non nulles d’espace doivent être égales, T11 = T22 = T33. Les deux seuls nombres indépendants sont donc T00 et un des Tii; Nous pouvons choisir d’appeler le premier la densité d’énergie r et le second la pression p. (Désolé d’utiliser la même lettre que pour l’impulsion.) Le tenseur énergie-impulsion, d’un fluide parfait prend alors la forme suivante dans son référentiel repos :
|
(1.107) |
Nous voudrions maintenant une formule valable pour tous les référentiels. Pour la poussière, comme nous avions Tmn = r.UmUn, on est tenté de poser (r+ p)UmUn, ce qui donne :
|
(1.108) |
Pour obtenir la réponse que nous voulons nous devons donc ajouter :
|
(1.109) |
Par chance, il y a une généralisation covariante évidente p.hmn.
La forme générale du tenseur énergie-impulsion pour un fluide parfait est alors :
|
(1.110) |
Cette formule est très importante pour les applications telles que la structure stellaire et la Cosmologie. À titre d’autres exemples, considérons les tenseurs énergie-impulsion de l’électromagnétisme et de la théorie scalaire des champs. Sans autre forme de procès, on peut directement poser :
|
(1.111) |
et
|
(1.112) |
Vous pourrez vérifier que par exemple, T00 est dans chaque cas égal à ce qu’on peut escompter que la densité d’énergie soit. En plus, comme Tmn est symétrique il jouit de la propriété très importante d’être conservé. Dans ce contexte la conservation se traduit par une divergence nulle :
|
(1.113) |
C’est un jeu de quatre équations, une par valeur de ν. Pour ν = 0 l’équation correspond à la conservation de l’énergie tandis que ¶mTmk = 0 exprime la conservation de la composante de rang k de l’impulsion. Nous n’allons pas le démontrer dans le cas général, la preuve s’appuie sur les équations du mouvement de la matière. En fait, on peut définir Tmn par un tenseur (2, 0) dont les unités qui sont l’énergie volumique, sont conservées.
Vous pouvez prouver la conservation de l’énergie-impulsion pour l’électromagnétisme, en prenant la divergence de (1.111) et en utilisant les équations de Maxwell que nous avons établies précédemment.
Un aparté ultime. Nous avons déjà signalé que la gravitation en Relativité Générale n’est pas une force. Corrélativement le champ gravitationnel ne doit pas avoir de tenseur énergie impulsion.
En fait il est très difficile de formuler une expression locale sensée de l’énergie d’un champ gravitationnel. Beaucoup de suggestions ont été faites mais elles se heurtent toutes à des arguments rédhibitoires. Bien qu’il n’y ait pas de réponse correcte, c’est une question importante dont la réponse permettrait de donner un son sens à des interrogations du type : quelle est l’énergie émise par seconde sous forme d’ondes gravitationnelles par un pulsar binaire ?